Головна » Прес-Центр » Статті та публікації » Реалізація системи шахтного водовідливу
04.07.2016
Мета: Розробити програмне забезпечення для програмовного логічного контролера VIPA System 100V, що реалізує систему керування шахтним водовідливом.
Розробити програмне забезпечення для програмовного логічного контролера VIPA System 100V, що реалізує систему керування шахтним водовідливом відповідно до заданого варіанту (варіант видає викладач).
Варіант 1:
Система керування повинна виконувати дії: після натискання кнопки “ПУСК” система приводиться в дію, після натискання кнопки “СТОП” вимикається. Якщо вода досягла аварійного рівня, система не може бути вимкнена. Основний насос повинен вмикатися з спрацювання датчика нижнього рівня і вимикаються, коли вода опуститься нижче датчика нижнього рівня. Додатковий насос повинен включатися для досягнення водою датчика аварійного рівня і вимикатися за зниженням води нижче датчика верхнього рівня.
Земна кора разом з корисними копалинами містить водоносні гірські породи. У процесі ведення гірничих робіт з розтину, підготовки та розробки родовища в гірничі виробки надходить вода з цих порід. По тріщинах, що утворюються в масиві гірських порід, у гірничі виробки проникають як підземні води, а й поверхневі. Вода також надходить із старих затоплених виробок та виробленого простору. З припливом води у шахту ускладнюється ведення гірничих робіт. Окрім того, вода погіршує санітарно-гігієнічні умови роботи шахтарів. Тому головним завданням шахтного водовідливу є видача підземних вод на поверхню в міру їхнього припливу в шахту. Вода, що надходить у шахту, відкачується на поверхню шахтними водовідливними установками: головними та допоміжними (рис. 1.).

1 – гірські породи; 2 – нагнітальна труба; 3 – основний насос; 4 – всмоктувальна труба; 5 – підземна вода; 6 — нагнітальна труба заливного насоса основного насоса; 7 – водозбірник; 8 – заливальний насос основного насоса; 9 – поверхнева вода; 10 – контроль рівня води; 11 – додатковий насос; 12 – заливальний насос додаткового насоса
Рисунок 1. – Структура шахтного водовідливу
Головна водовідливна установка призначена для відкачування всього припливу води із шахти на поверхню. Якщо глибина шахти більша за величину напору, створюваного одним насосом, то використовують послідовні або багатоступінчасті схеми водовідливу. Допоміжні водовідливні установки відкачують воду з окремих горизонтів до водозбірників головного водовідливу. До водозбірника головного водовідливу вода надходить водовідливними канавками або по нагнітальних ставах допоміжних водовідливів.
Стенд системи керування шахтним водовідливом складається з фізичної моделі шахтного водовідливу та демонстраційної моделі системи керування шахтним водовідливом.
Фізична модель шахтного водовідливу
Структура фізичної моделі шахтного водовідливу представлена на рис. 2..

1 – колба припливу; 2 – трубка; 3 – заслінка; 4 – колба, що імітує водозбірник; 5 – датчик аварійного рівня; 6 – датчик верхнього рівня; 7 – датчик нижнього рівня; 8 — насос
Рисунок 2. – Структура фізичної моделі шахтного водовідливу
У колбі припливу (1) та колбі, що імітує водозбірник (4) знаходиться вода. Для регулювання припливу води між колбами використовується заслінка (3). Зміною положення заслінки можна регулювати швидкість притоку. Для визначення рівня води використовуються електродні датчики (5, 6, 7), що працюють за принципом контролю опору ланцюга електрод-грунт. При знаходженні води на рівні датчика або вище опір зменшується, на виході пристрою контролю рівня з'являється сигнал замкнутого контакту, при опусканні води нижче рівня датчика опір збільшується та вихідний контакт розмикається. Відкачування води з колби, що імітує водозбірник, провадиться за допомогою насоса. Скидання води проводиться у колбу припливу. Насос може бути увімкненому або вимкненому стані, під час роботи він має постійну продуктивність.
Для правильного функціонування фізичної моделі шахтного водовідливу необхідно, щоб при однаковому рівні води в лівій та правій колбі вона досягала датчика аварійного рівня.
Демонстраційна модель системи керування шахтним водовідливом
Структура демонстраційної моделі системи керування шахтним водовідливом представлена на рис. 3..

1 – індикатор основного насоса; 2 — імітатор заливного насоса основного насоса; 3 – імітатор додаткового насоса; 4 – індикатор датчика аварійного рівня; 5 – індикатор датчика верхнього рівня; 6 – індикатор датчик нижнього рівня; 7 – імітатор заливного насоса додаткового насоса
Малюнок 3. – Структура демонстраційної моделі шахтного водовідливу.
Система керування шахтного водовідливу реалізована на базі програмовного логічного контролера VIPA System 100V. До контролера підключені датчики та виконавчі елементи фізичної моделі шахтного водовідливу: датчики нижнього рівня, верхнього рівня, аварійного рівня та насос.
Також до контролера підключені імітатори та кнопки демонстраційної моделі: імітатор додаткового насоса (3), імітатор заливного насоса основного насоса (2), імітатор заливного насоса додаткового насоса (7), імітатор аварійної сигналізації, кнопки “ПУСК”, “СТОП”.
Система керування шахтним водовідливом виконує функції керування відкачуванням води з водозбірника на поверхню. Водозбірник є ємністю, куди зливається припливна вода. Відкачування води виконують насоси, розташовані над водозбірником. Так як відцентрові насоси до початку роботи вони повинні бути заповнені водою. Для цієї мети використовуються заливні насоси, розташовані нижче рівня води. Після заповнення камер насоси вмикаються і починають качати воду на поверхню. Фізична модель разом із демонстраційною відображає принцип роботи реальної системи керування шахтним водовідливом.
Для запуску системи потрібно натиснути кнопку “ПУСК” демонстраційної моделі. Залежно від рівня води у колбі водозбірника відбувається спрацьовування відповідних датчиків фізичної моделі, що відображається індикаторами демонстраційної моделі. Контролер, реагуючи на спрацьовування датчиків, включає або вимикає насос фізичної моделі відповідний індикатор і імітатори демонстраційної моделі. У разі спрацювання датчика аварійного рівня фізичної моделі контролер включає імітатор сигналізації аварійної демонстраційної моделі. Для зупинення системи необхідно натиснути кнопку "СТОП" демонстраційної моделі.

Рисунок 4. – Схема електрична принципова система керування
Схема з'єднань стенду системи керування шахтним водовідливом
Схема електрична принципова стенда системи керування шахтним водовідливом наведено на рис. 4.. Індикатори датчиків рівня води є частиною пристрою контролю рівня води. Індикатор основного насоса є частиною контактора.
У табл. 1. наведено значення адрес входів/виходів програмовного логічного контролера відповідних схемою з'єднань.
| Адреси входів/виходів ПЛК | Символьні змінні | Виконавчі механізми/датчики |
|---|---|---|
| Q 0.0 | PumpMain | Основний насос |
| Q 0.1 | PumpAdditional | Додатковий насос |
| Q 0.4 | LedAlarm | Аварійна сигналізація |
| I 0.0 | SensorHighLevel | Датчик верхнього рівня |
| I 0.1 | SensorLowLevel | Датчик нижнього рівня |
| I 0.2 | SensorEmergencyLevel | Датчик аварійного рівня |
| I 0.3 | ButtonRun | Кнопка “ПУСК” |
| I 0.4 | ButtonStop | Кнопка “СТОП” |
| Q 1.0 | StateSignal_0 | Сигнал стану 0 |
| Q 1.1 | StateSignal_1 | Сигнал стану 1 |
| Q 1.2 | StateSignal_2 | Сигнал стану 2 |
| Q 1.3 | StateSignal_3 | Сигнал стану 3 |
| Q 1.4 | StateSignal_4 | Сигнал стану 4 |
Програмований логічний контролер VIPA System 100V
Програмований логічний контролер, який використовується в демонстраційній моделі системи керування шахтним водовідливом VIPA 115-6BL22 (рис. 5), відноситься до сімейства контролерів VIPA System 100V – компактні системи керування. Технічні характеристики контролера наведено у табл. 2..
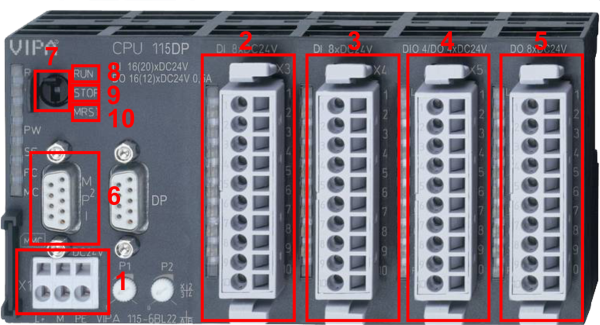
Рисунок 5. – Програмований логічний контролер VIPA 115-6BL22
За допомогою роз'єму X1 (1) до контролера підключається живлення 24 В. Контролер має два порти входів підключені до роз'ємів X3 (2) (DI 8xDC24V), X4 (3) (DI 8xDC24V), один порт входів/виходів підключений до роз'єму X5 ( 4) (DIO 4/DO 4xDC24V) молодший зошит якого може бути налаштований як входи або виходи і один порт виходів підключений до роз'єму X6 (5) (DO 8xDC24V). Входи та виходи гальванічно розв'язані та працюють з 24 В сигналами. Структура входів та виходів портів представлена на рис. 6.. Підключення до портів представлено на рис. 7..
| Характеристика | Значення |
|---|---|
| Завантажувальна пам'ять | 24 кБайти |
| Робоча пам'ять | 16 кБайт |
| Кількість входів | 16 (20) |
| Кількість виходів | 16 (12) |
| Інтерфейси | MP2I, DP-Slave |
| Напруга живлення | 24 В |

Рисунок 6. – Структура входів та виходів портів

Рисунок 7. – Підключення до портів контролера VIPA 115-6BL22
Контролер може бути підключений до комп'ютера або панелі HMI за допомогою RS-232 інтерфейсу. Для підключення контролера використовується "Green Cable" (зелений кабель). На стороні контролера зелений кабель підключається до роз'єму MP2I (6) інтерфейсу на боці комп'ютера до порту COM порту. Дане підключення використовується для програмування контролера та зв'язку його з HMI/SCADA системами.
Для керування режиму роботи контролера використовується операційний перемикач (7), що має 3 положення. У положенні “RUN” (ПУСК) (8) контролер виконує програму. У положенні “STOP” контролер може бути перепрограмовний. У положенні “MRES” виконується скидання пам'яті контролера.
Визначити стан роботи контролера можна за допомогою світлодіодних індикаторів, що знаходяться в лівій частині контролера (рис. 8.). Індикатор “R” блимає під час запуску програми та увімкнений під час виконання програми (режим операційного перемикача “RUN”). Індикатор “S” блимає під час скидання пам'яті контролера та увімкнено, коли виконання програми зупинено (режим операційного перемикача “STOP”). Індикатор PW показує наявність живлення контролера. Індикатор “SF” увімкнено за наявності помилки апаратного забезпечення. Індикатор “FC” увімкнений, коли вхідні або виходи в режимі налагодження встановлені. Індикатор “MC” увімкнений, коли використовується флеш-пам'ять MMC.
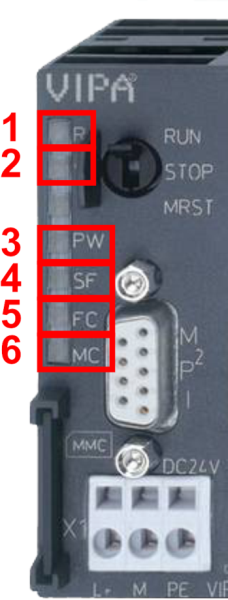
Рисунок 8. – Індикатори стану роботи контролера
Порядок виконання роботи відповідає завданню варіанта 6.
Розробка графа станів
Під час розробки програмного забезпечення дискретних систем керування зручно виконувати опис системи як графа станів. Це дозволяє наочно продемонструвати роботу системи, полегшує перевірку правильності роботи алгоритму, а також спрощує переведення алгоритму в програмний код.
При побудові графа спочатку потрібно виділити стану, у яких може бути система. Після цього визначити умови переходу з одного стану до іншого.
На графі стану позначаються колами із зазначенням номера у центрі, а переходи між станами дугами із зазначенням напрямку, над дугами до слеша “/” вказуються умови переходу, потім вказуються вихідні сигнали. Якщо значення умови або сигналу виходу встановлено, використовується його ім'я, якщо скинуто перед ім'ям необхідно встановити знак “!”.
Система керування шахтним водовідливом, що розробляється, може перебувати в чотирьох станах:
Початковим станом для системи є 0, в нього так само можна перейти по натисканню кнопки “СТОП”.
Система переходить зі стану 0 до стану 1 після натискання кнопки “ПУСК”.
Система переходить зі стану 1 до стану 2 при спрацьовуванні датчика верхнього рівня. При відключенні нижнього рівня датчика відбувається перехід зі стану 2 в стан 1.

Рисунок 9. – Граф станів системи керування шахтним водовідливом
Система переходить зі стану 2 до стану 3 при спрацьовуванні датчика аварійного рівня. При відключенні датчика аварійного рівня відбувається перехід із стану 3 до стану 2.
Розроблений граф станів системи керування шахтним водовідливом представлений на рис. 9..
Середовище розробки WinPLC7
Для конфігурування та програмування ПЛК VIPA використовується середовище розробки WinPLC7. До складу середовища входять редактори мов програмування STL, LAD, FBD, програматор, відладчик та симулятор ПЛК.
Середовище може бути встановлене на комп'ютер користувача в демонстраційному режимі, який дозволяє виконувати розробку програмного забезпечення та його налагодження в симуляторі.
Створення проекту
Після запуску середовища розробки, для створення проекту необхідно натиснути кнопку “Create a new solution …” (рис. 10.). У вікні (рис. 11.) необхідно заповнити поле “Name:” (Назва:) вказавши назву проекту “LaboratoryWork_01” (1). Після цього натиснути кнопку “Create” (Створити).

Рисунок 10. – Стартове вікно програмного забезпечення
Вікно роботи з проектом, що відкрилося (рис. 1.) включає в себе: меню (1), панель швидких кнопок (2), список підключення до цільового об'єкта (3), вікно керування проектом (4), вікно редактора проекту (5), панель швидкого переходу (6), вікно інструментів (7), рядок стану (8). Панель швидких кнопок з назвами елементів, що найчастіше використовуються, представлена на рис. 1..

Рисунок 11. – Вікно створення проекту
У новому проекті за умовчанням як цільовий об'єкт використовується “Simulator” (Симулятор). Так само в ньому вже створено організаційний блок OB1, таблицю символьних змінних та таблицю змінних стану. Стан підключення до контролера та його роботи відображається у рядку станів.

Рисунок 12. – Основне вікно програми

Рисунок 13. – Панель швидких кнопок
Таблиця символьних імен змінних
Під час програмування ПЛК існує два підходи роботи з даними: використання прямої адресації та використання символьних імен змінних. Другий підхід кращий, він дозволяє надавати адресам інтуїтивно зрозумілі імена, використовувати коментарі для опису виконавчих механізмів і датчиків, пов'язаних з адресами, при підключенні нового обладнання або зміні поточної конфігурації достатньо змінити адреси пов'язані зі змінними. У прикладі наведено другий підхід.
До початку розробки програми необхідно заповнити таблицю символьних змінних імен. Заповнення таблиці виконується у вікні “Tools…” (Інструменти) на вкладці “SymbolTable.SEQ”, дане вікно прив'язане до нижнього краю вікна середовища розробки.

Рисунок 14. – Вікно редактора позначень
Вікно (рис. 14.) являє собою таблицю з чотирма стовпцями. Для додавання та видалення змінних використовуються контекстне меню, яке відкривається після натискання правої кнопки миші в області таблиці. При введенні змінної у разі виникнення помилки вона стає червоного кольору, при дублюванні символьного імені обидві змінні стають рожевого кольору.
При додаванні змінної спочатку необхідно ввести адресу (1), після чого відредагувати символічне ім'я (2), тип (3) і коментар (4). Для зручності швидкого додавання великої кількості змінних з адресами, що йдуть поспіль, використовуються кнопки “Копіювати та інкрементувати адресу” (5) та “Копіювати та декрементувати адресу” (6). Спочатку необхідно ввести початкову або кінцеву адресу змінної, після чого за допомогою відповідної кнопки додати необхідну кількість змінних. Далі виконати редагування символьних імен, типів та коментарів. Після закінчення редагування позначок необхідно зберегти зміни використовується кнопку “Save” (Зберегти) (7).

Рисунок 15. – Вікно редактора позначень
Приклад заповненої таблиці символьних імен відповідно до завдання наведено на рис. 15..
Функції двійкової логіки
Для реалізації розробленого графа станів системи керування водовідливу, достатньо функцій двійкових операцій: І, встановлення та скидання.
Двійкова функція І (рис. 16.) може мати будь-яку кількість функціональних входів. Якщо вхід веде безпосередньо до функціонального елемента, то сигнальний стан операнда, що зчитується, безпосередньо використовується в логічній операції; якщо вхід забезпечений знаком заперечення, то сигнальний стан операнда, що сканується, інвертується перед виконанням логічної операції.
Функції установки та скидання (рис. 17.) можуть завершувати логічну операцію. Ці елементи активуються лише тоді, коли результат логічної операції, що прямує до блокового елемента, дорівнює “1”.

Рисунок 16. – Функції двійкової логіки
Якщо результат логічної операції, установки дорівнює "1", то операнд над елементом встановлюється в сигнальний стан "1". Якщо результат логічної операції скидання дорівнює “1”, то операнд над елементом перетворюється на сигнальний стан “0”. Якщо результат логічної операції, що передається в блоковий елемент установки або скидання, дорівнює “0”, двійковий операнд залишається незмінним.

Рисунок 17. – Функції встановлення та скидання
Реалізація графа станів у вигляді програми
При розробці програмного забезпечення на основі графа станів незалежно від мови програмування зручно розбити програму на сегменти двох типів. Сегменти встановлення стану та сегменти зміни вихідних сигналів.

Рисунок 18. – Сегмент встановлення стану
Структура сегмента установки стану наведена на рис. 18.. Для перевірки виконання умови переходу використовується функція І. На її входи подається значення стану, з якого можливе виконання переходу в новий стан та умова переходу. Якщо встановлено значення стану та умова переходу виконується, відбувається встановлення нового стану.
Після сегмента установки стану йде сегмент зміни вихідних сигналів. Структура сегмента наведена на рис. 19..

Рисунок 19. – Сегмент зміни вихідних сигналів
Для перевірки відповідності сегмента переходу в новий стан використовується блок І. Якщо умова виконується, відбувається зміна вихідних сигналів, що відповідає даному переходу, після чого стан з якого виконувався перехід скидається.
Кожному сегменту зміни вихідного сигналу повинен відповідати сегмент установки стану. Таким чином, кожній дузі графа станів відповідає пара: встановлення стану, зміна вихідних сигналів.
Під час запуску контролера відбувається ініціалізація пам'яті, прапори станів набувають нульового значення. Для встановлення початкового стану використовується сегмент установки стану. Умова формується так, що якщо не один із станів не встановлений, встановлюється початковий стан (рис. 20.).

Рисунок 20. – Сегмент встановлення початкового стану
Основна програма, організаційний блок OB 1
Програмне забезпечення системи керування шахтним водовідливом, що розробляється, не має жорстких вимог до часу реакції на події або специфічних запитів до організації виконання. Тому програмний код може бути розміщений у тілі основної програми. Тіло основної програми розміщується в організаційному блоці OB 1, цей блок циклічно викликатиметься під час роботи контролера.
Для відкриття блоку OB 1 необхідно у вікні редактора вмісту проекту натиснути по ньому двічі. За замовчуванням блок містить поля: назву блоку, коментарі блоку та “Network 1” (Сегмент 1). Сегмент включає назву сегмента, коментарі сегмента, вибір мови програмування, поле введення програми, таблицю змінних використовуваних в сегменті.
Поля назви та опису елементів програмного забезпечення виконують функції коментарів. Заповнення даних полів покращує сприйняття коду програми, полегшує пошук помилок, зменшує час, що витрачається на налагодження.

Рисунок 21. – Сегмент та його панель швидких кнопок
Сегмент та його панель швидких кнопок представлені на рис. 21.. Для додавання нового сегмента в кінець організаційного блоку необхідно натиснути кнопку "Add a network at the end of the block" (Додати сегмент в кінець блоку) (1). Щоб додати новий сегмент перед існуючим, необхідно натиснути кнопку “Додати сегмент перед поточним” (2). Щоб видалити “Delete network” (Видалити сегмент) (3).
Перед початком введення програми в сегмент необхідно вибрати мову програмування функціональних планів FBD. Для введення коду сегмента необхідно перевести курсор миші в поле з написом “” (<порожній>) та натиснути ліву кнопку.
У зв'язку з особливостями середовища розробки під час програмування не бажано змінювати мову програмування сегмента. Після перетворення коду з однієї мови на іншу зворотне перетворення може бути недоступним.
Для додавання функцій використовується вкладка вікна керування проектом “Catalog” (Каталог), вона містить стандартні та бібліотечні блоки. Щоб додати блок функції, необхідно двічі натиснути по ньому в каталозі або перетягнути його в поле за допомогою миші.
При програмуванні на мові функціональних планів у вікні редактора вмісту проекту на панелі швидких кнопок (мал. 22) з'являються кнопки, які дозволяють виконувати: додавання входів та їх інверсію не використовуючи вкладку каталогу. Також на панель додаються кнопки вставки блоків І, АБО, присвоєння. За допомогою панелі можна перейти до режиму спостереження.

Рисунок 22. – Панель швидких кнопок
Щоб додати вхід блочному елементу, необхідно вибрати тіло елемента або його вхід і натиснути кнопку “Подвійний вхід”. Щоб інвертувати вхід, його необхідно вибрати та натиснути кнопку “Інверсія”. Додавання виходу можливе лише перед завершальними блоками та лише завершальними блоками. До завершальних блоків відносяться S і R. Для додавання необхідно, щоб завершальний блок був підключений до виходу попереднього блоку, а його оператор був заданий. Щоб додати новий блок, необхідно перетягнути його на існуючий.
Для введення операнда блоку необхідно вибрати операнд, натиснути клавішу “Enter”, ввести операнд або символ подвійного лапки “””. Після введення “”” відкриється меню з символьними змінними. Для завершення введення потрібно натиснути клавішу “Enter”.
Розробка програмного забезпечення
Розроблений граф станів містить 8 переходів, кожен перехід відповідає сегменту установки стану та сегменту зміни вихідних сигналів, так само необхідно виконати встановлення початкового стану. Програмне забезпечення, що розробляється, повинно містити 17 сегментів.
При виконанні програми ПЛК виконує сегменти послідовно 1, 2, …, N. Тому для правильної обробки переходу в новий стан необхідно, щоб сегмент установки стану йшов перед відповідним сегментом зміни вихідних сигналів:
Значення стану системи повинні зберігатися між викликами організаційного блоку основної програми, для цього вони повинні зберігатися в статичній пам'яті. Такою областю є меркери, вони зберігаються в незалежній пам'яті і втрачають своє значення тільки у разі перепрограмування ПЛК або повного перезапуску. Змінні області меркерів адресуються з використанням префікса “M”.
Для зберігання стану системи обрані меркери, що представляють собою бітові змінні: M 0.0, M 0.1, M 0.2, M 0.3. Оголошені змінні будуть використовуватись для фіксації знаходження системи у відповідному стані. Якщо змінна встановлена система перебуває у відповідному змінному стані. При переході з поточного стану в новий, в сегменті установки стану проводиться запис у відповідний меркер значення "1", далі в сегменті зміни вихідних сигналів виконуються зміни сигналів, після цього змінна стани, з якого виконувався перехід, скидається в "0". >
У таблиці символьних імен кожному меркер задати символьне ім'я: State_0, State_1, State_2, State_3. Виробник ПЛК рекомендує як символьні імена для станів системи використовувати їх назви, у цьому випадку імена змінних обрані для спрощення реалізації графа станів у вигляді програми.

Рисунок 23. – Реалізація сегменту 1
Розроблений сегмент 1 установки початкового стану наведено на рис. 23.. Перехід у цей стан виконується при перезапуску системи керування шахтним водовідливом.
Умова переходу перевіряється функцією І, якщо немає встановленого стану, отже система запускається вперше після перепрограмування контролера або був виконаний повний перезапуск і всі дані були видалені. Якщо умова виконується, значення стану стоп встановлюється, також встановлюється сигнал стану.

Рисунок 24. – Реалізація сегменту 2
Розроблений сегмент 2 установки стану стоп наведено на рис. 24.. Перехід у цей стан виконується за натисканням кнопки “СТОП”. Якщо умова виконується стан стоп та його сигнал встановлюються.

Рисунок 25. – Реалізація сегменту 4

Рисунок 26. – Реалізація сегменту 4
Розроблений сегмент 3 зміни вихідного сигналу при переході в стан стоп наведено на рис. 25.. Функція І перевірка переходу зі стану спокою в стан стоп. Якщо умова виконується стан спокою, з якого виконувався перехід, а також сигнал стану скидаються.
Розроблений сегмент 4 установки стану стоп наведено на рис. 26.. Перехід у цей стан виконується за натисканням кнопки “СТОП”. Якщо умова виконується стан стоп та його сигнал встановлюються.
Розроблений сегмент 5 зміни вихідного сигналу при переході в стан стоп наведено на рис. 27.. Функція І виконує перевірку переходу зі стану відкачування води у стан стоп. Якщо умова виконується основний насос вимикається, стан відкачування води, з якого виконувався перехід, а також сигнал цього стану скидаються.

Рисунок 27. – Реалізація сегменту 5
Розроблений сегмент 6 установки стану стоп наведено на рис. 28.. Перехід у цей стан здійснюється за натисканням кнопки “СТОП”. Якщо умова виконується стан стоп та його сигнал встановлюються.

Рисунок 28. – Реалізація сегменту 6
Розроблений сегмент 7 зміни вихідного сигналу при переході в стан стоп наведено на рис. 29.. Функція І виконує перевірку переходу зі стану аварійного відкачування води у стан стоп. Якщо умова виконується основний та додатковий насоси вимикаються, стан аварійного відкачування води, з якого виконувався перехід, а також сигнал цього стану скидаються.

Рисунок 29. – Реалізація сегменту 7
Розроблений сегмент 8 установки стану спокою наведено на рис. 30.. Перехід у цей стан виконується за натисканням кнопки “ПУСК”. Якщо умова виконується стан спокою та його сигнал встановлюються.

Рисунок 30. – Реалізація сегменту 8
Розроблений сегмент 9 зміни вихідного сигналу при переході у стан спокою наведено на рис. 31.. Функція І виконує перевірку переходу зі стану стоп у стан спокою. Якщо умова виконується стан стоп, з якого виконувався перехід, а також сигнал стану скидаються.

Рисунок 31. – Реалізація сегменту 9
Розроблений сегмент 10 установки стану спокою наведено на рис. 32.. Перехід у цей стан виконується при відпусканні датчика нижнього рівня. Якщо умова виконується стан спокою та його сигнал встановлюються.

Рисунок 32. – Реалізація сегменту 10
Розроблений сегмент 11 зміни вихідного сигналу при переході у стан спокою наведено на рис. 33.. Функція І виконує перевірку переходу зі стану відкачування води у стан спокою. Якщо умова виконується основний насос, вимикається стан відкачування води, з якого виконувався перехід, а також сигнал даного стану скидаються.

Рисунок 33. – Реалізація сегменту 11
Розроблений сегмент 12 установки стану відкачування води наведено на рис. 34.. Перехід у цей стан виконується при спрацьовуванні датчика верхнього рівня. Якщо умова виконується стан відкачування води та її сигнал встановлюються.

Рисунок 34. – Реалізація сегменту 12
Розроблений сегмент 13 зміни вихідного сигналу при переході в стан відкачування води наведено на рис. 35.. Функція І перевірка переходу зі стану спокою в стан відкачування води. Якщо умова виконується основний насос, включається стан спокою, з якого виконувався перехід, а також сигнал даного стану скидаються.

Рисунок 35. – Реалізація сегменту 13
Розроблений сегмент 14 установки стану відкачування води наведено на рис. 36.. Перехід у цей стан виконується при відпусканні датчика аварійного рівня. Якщо умова виконується стан відкачування води та її сигнал встановлюються.

Рисунок 36. – Реалізація сегменту 14

Рисунок 37. – Реалізація сегменту 15
Розроблений сегмент 15 зміни вихідного сигналу при переході в стан відкачування води наведено на рис. 37.. Функція І виконує перевірку переходу зі стану аварійного відкачування води у стан відкачування води. Якщо умова виконується додатковий насос, вимикається стан аварійного відкачування води, з якого виконувався перехід, а також сигнал даного стану скидаються.
Розроблений сегмент 16 установки стану аварійної відкачування води наведено на рис. 38.. Перехід у цей стан виконується при спрацьовуванні датчика аварійного рівня. Якщо умова виконується стан аварійного відкачування води та його сигнал встановлюються.

Рисунок 38. – Реалізація сегменту 16
Розроблений сегмент 17 зміни вихідного сигналу при переході в стан аварійної відкачування води наведено на рис. 39.. Функція І перевірка переходу зі стану відкачування води в стан аварійного відкачування води. Якщо умова виконується додатковий насос, включається стан відкачування води, з якого виконувався перехід, а також сигнал цього стану скидаються.

Рисунок 39. – Реалізація сегменту 17
Симулятор ПЛК
Для завантаження програмного забезпечення на цільовий об'єкт використовується кнопка на панелі швидких кнопок “Передати всі блоки”. При відсутності фізичного контролера тестування програмного забезпечення можна виконувати в симуляторі, для цього за допомогою списку підключення до цільового об'єкта необхідно вибрати “Simulator” (Симулятор).
Спостереження та керування входами та виходами котролера при симуляції виконується за допомогою моделі ПЛК. Щоб відкрити відповідне вікно, необхідно натиснути на кнопку панелі швидких кнопок “Вікно моделювання ПЛК”.
При натисканні правої кнопки миші по моделі відкривається меню (рис. 40.), за допомогою якого в модель можна додати або видалити модулі дискретного введення, дискретного виводу, двійково-десяткового введення, двійково-десяткового виводу, аналогового введення та аналогового виведення.

Рисунок 40. – Меню додавання модулів
Приклад налаштованої моделі ПЛК наведено на рис. 41.. У верхній частині модуля вказується його тип та адреса (1). Якщо виконати подвійне натискання по модулю введення або виведення, відкриється вікно налаштування модуля, в якому можна змінити його адресу. На модулях відображаються символьні імена змінних, що відповідають адресам (2).

Рисунок 41. – Вікно моделювання ПЛК
Входи модулів інтерактивні, при натисканні по кнопці (3) відповідний вхід встановлюється в “1”, кнопка змінює колір на зелений при повторному натисканні він скидається в “0”, кнопка змінює колір на сірий.
Виходи модулів відображають стан за допомогою індикаторів (4). Якщо вихід встановлюється в “1”, колір індикатора відповідного виходу змінюється на зелений, якщо вихід скидається в “0” індикатор змінює колір на сірий.
У зв'язку з особливостями середовища розробки параметри вікна моделювання не зберігаються під час його закриття. При повторному відкритті вікна налаштування необхідно проводити заново.
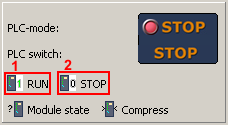
Рисунок 42. – Вкладка центру керування контролером
Керуванняроботою симулятора виконується за допомогою вкладки “CPU-Control Center” (Центр керування контролером) (рис. 42) вікна керування проектом. Для запуску роботи моделі необхідно натиснути кнопку “RUN” (1), щоб зупинити кнопку “STOP” (2).

Рисунок 43. – Вікно редагування проекту у режимі спостереження
Під час роботи моделі можна перейти в режим спостереження, він дозволяє переглядати поточні значення змінних. Змінні, встановлені в “1”, відображаються рожевим кольором, змінні, скинуті в “0” сірим. Якщо результат виконання функції дорівнює “0”, її блок відображається сірим кольором, якщо “1” рожевим кольором (рис. 43.). Для переходу в режим спостереження необхідно натиснути кнопку у вікні редактора проекту на панелі швидких кнопок “Увімкнути/вимкнути режим спостереження”.
Графічні мови програмування, включаючи мову функціональних планів (FBD), не дозволяють виконувати покрокове налагодження програмного забезпечення та використовувати контрольні точки.
Порядок роботи зі стендом системи керування шахтним водовідливом
Для включення стенду необхідно:
Для вимкнення стенда необхідно:
Програмування контролера VIPA System 100V
Для програмування контролера необхідно підключити його до комп'ютера за допомогою “Green Cable” (Зелений кабель). Увімкнути живлення контролера. Запустити середовище розробки WinPLC7 і відкрити потрібний проект. Вибрати цільовий об'єкт “RS-232”. У меню “Extras” (Додатки) натисніть “Target properties of Target: RS-232” (Налаштування порту RS-232). У вікні “Serial interface setup …” (Установка послідовного з'єднання …) (мал. 44.) встановити прапорець “Click here, if you use the Green Cable” (Використовується Зелений кабель) (1), вказати, за яким послідовним інтерфейсом підключений контролер (2), після чого натиснути кнопку “Connect” (Підключитися) (3). У разі невдачі рядок стану прийме червоний колір і в ньому з'явиться повідомлення “Error when starting the communication: Can connect to MPI adapter. MPI-adapter connected to the correct interface?” (Помилка початку з'єднання: Неможливо підключитися до MPI перетворювача. MPI перетворювач підключений до правильного інтерфейсу?), у разі успіху відкриється вікно з написом “The connection to the PLC is OK!” (З'єднання з PLC у порядку!). ПcOK” (4).
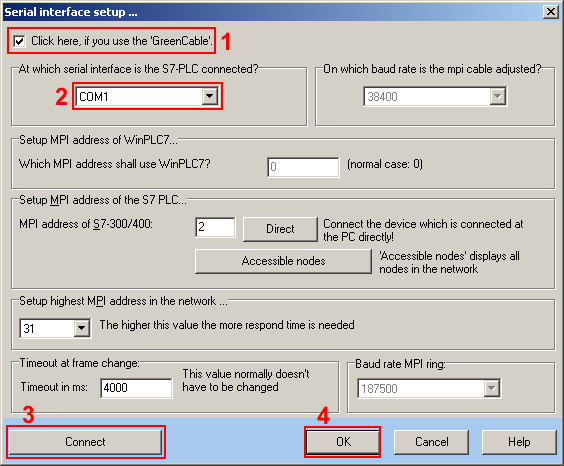
Рисунок 44. – Вікно “Встановлення послідовного з'єднання…”
Далі необхідно натиснути на кнопці панелі швидких кнопок “Вікно режиму роботи”, після чого відкриється вікно “Operating mode” (Режим роботи) (мал. 45.). Якщо контролер перебуває в режимі “RUN”, то з цього вікна можна зупиняти контролер за допомогою кнопки “Stop PLC” (Зупинити ПЛК) (1), із зупиненого стану його можна перезапустити за допомогою кнопки “Warm restart” (Перезапуск із пам'яті) ( 2).
Для запису програми в контролер його необхідно зупинити та за допомогою кнопки “Передати всі блоки” запрограмувати. Для запуску програми необхідно відкрити вікно “Режим роботи” та натиснути кнопку “Перезапуск із пам'яті”, після чого контролер почне виконувати програму.
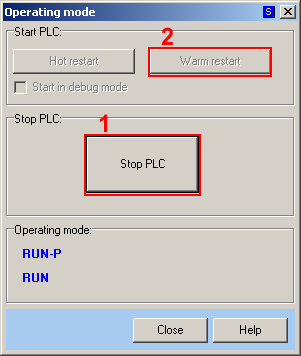
Рисунок 45. – Вікно "Режим роботи"
SCADA система zenon
SCADA (диспетчерське керування та збір даних) – програмний пакет для збору, обробки, відображення та архівування інформації про об'єкт керування. SCADA встановлюється на HMI-панелі, промислові та персональні комп'ютери.
SCADA система zenon рекомендується виробником для використання з контролерами VIPA і дозволяє підключатися до них зеленим кабелем.
Відповідно до завдання розроблено програму для SCADA системи zenon. Програма реалізує людино-машинний інтерфейс, призначений для спостереження за роботою демонстраційної моделі системи керування шахтним водовідливом. Програма відкомпільована у файл, що виконується, і виконується Runtime сервером.
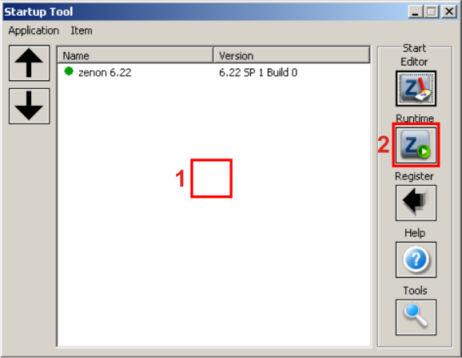
Рисунок 46. – Вікно програми “zenon Startup”
Запуск програми виконується менеджером завантажень “zenon Startup”. Після запуску "Zenon Startup" відкривається вікно рис. 46.. Для додавання програми до списку необхідно натиснути правою кнопкою миші в центрі вікна (1). У меню вибрати пункт “New…”. У вікні “New item…” (Назва елемента) (мал. 47.) у полі “Name:” (Назва) (1) ввести “LaboratoryWork_01_06”, у полі “Program path:” (Шлях до програми) (2) ввести шлях до Runtime серверу:
“C:\Program Files\COPA-DATA\zenon 7.00 SP0”,
у полі “RT-Path:” (3) ввести шлях до файлу налаштувань відкомпільованої програми:
“Путь\LaboratoryWork_01\TASK_06\RT\FILES\zenon\system\project.ini”,
потім натиснути кнопку “OK” (4). Вибрати у списку “Name” (Назва) програму під назвою “LaboratoryWork_01_06” та запустити її натисканням кнопки “Runtime” (рис. 46. – 47).

Рисунок 47. – Вікно“New item…”
Після запуску Runtime сервера з обраною програмою відкриється вікно з людино-машинним інтерфейсом, представленим на рис. 48.. У разі відсутності зв'язку з контролером на елементах пов'язаних з даними, що надходять від нього, блиматимуть червоні квадрати.

Рисунок 48. – Людино-машинний інтерфейс демонстраційної моделі системи керування шахтним водовідливом
Представлений людино-машинний інтерфейс дозволяє спостерігати за роботою системи керування. Відображає стан демонстраційної моделі, фізичної моделі, перехід та стан системи відповідно до графа.
Перевірка роботи програмного забезпечення на стенді системи керування шахтним водовідливом
Правильність роботи програмного забезпечення визначається відповідністю дій, що виконуються системою керування діям, описаним у завданні.
Для перевірки спочатку необхідно за допомогою заслінки вирівняти рівень води в колбах. Після цього закрити заслінку та натиснути кнопку “ПУСК”. Вода знаходиться вище аварійного рівня, система повинна перейти в стан 3. Якщо вихід стану (StateSignal_3) не встановлюється, насос фізичної моделі або імітатор додаткового насоса не ввімкнено, сталася помилка програмного забезпечення.
Насос перекачує воду в колбу припливу, рівень у колбі, що імітує водозбірник, падає. При зниженні води нижче датчика аварійного рівня, система повинна перейти в стан 2 і вимкнути імітатор додаткового насоса. Якщо вихід стану (StateSignal_2) не встановлюється, імітатор додаткового насоса не вимикається або вимикається основний насос, виникла помилка програмного забезпечення.
Насос продовжує перекачувати воду. При зниженні води нижче датчика нижнього рівня, система повинна перейти в стан 1 і вимкнути насос фізичної моделі. Якщо вихід стану (StateSignal_1) не встановлюється, насос фізичної моделі не вимикається або вмикається імітатор додаткового насоса, виникла помилка програмного забезпечення.
Для перевірки спрацьовування кнопки “СТОП” необхідно перевірити реакцію системи на її натискання у кожному стані, система має перейти у стан“0. Якщо вихід стану (StateSignal_0) не встановлюється або не вимикається насос фізичної моделі або імітатор додаткового насоса, виникла помилка програмного забезпечення.