Головна » Прес-Центр » Новини » Результати Всеукраїнської студентської олімпіади «КОМП'ЮТЕРИЗОВАНІ СИСТЕМИ УПРАВЛІННЯ ТА АВТОМАТИКА»
13.05.2015

ВСЕУКРАИНСКАЯ СТУДЕНЧЕСКАЯ ОЛИМПИАДА
"КОМПЬЮТЕРИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ И АВТОМАТИКА"
С 20 по 24 апреля 2015 года на базе кафедры Автоматизации и компьютерных систем Национального горного университета проходил II этап Всеукраинской студенческой олимпиады по специальности "Компьютеризированные системы управления и автоматика".
Олимпиада проходит в два тура: теоретический и практический. В теоретическом туре перед студентами ставятся абстрактные задачи, связанные с теорией автоматического управления и теорией систем. В практическом туре ставятся прикладные задачи, связанные с идентификацией объектов управления, проектированием систем управления, разработкой программного обеспечения систем управления и их настройкой. Коллектив "Учебного центра компании СВ АЛЬТЕРА" вызвался взять на себя подготовку и проведение практического тура олимпиады в соответствии с прошлогодней концепцией. Ее суть заключается в вынесении в задание вопросов, связанных с использованием практических навыков работы с промышленным оборудованием. Задание будет сформировано таким образом, что бы в нем не было вопросов по специальности, связанных со спецификой какого бы ни было высшего учебного заведения. Для подготовки студентам будет предоставлен полный доступ к заданию.
В 2014 году в качестве задания на олимпиаду были вынесены вопросы разработки программного обеспечения под SCADA систему zenon и программный программируемый логический контроллер (ПЛК) zenon Logic. Основной упор шел на дискретное управление с использованием комбинационных автоматов. В этот раз было принято решение подготовить задание по системам управления непрерывными объектами, так как проектирование, разработка и настройка таких систем является отличительной особенностью специальности "Компьютеризированные системы управления и автоматика".
К началу декабря были выдвинуты основные требования к заданию. Вопросы охватывали все практические аспекты проектирования и настройки систем управления линейными непрерывными объектами. Для управления объектом было предложено использование ПИД регулятора, конечным же результатом работы должны быть настройки структурных составляющих регулятора, обеспечивающих корректную работу системы управления в соответствии с заданием. Структура регулятора должна соответствовать современным промышленным решениям. Настройка регулятора может быть выполнена произвольным методом.
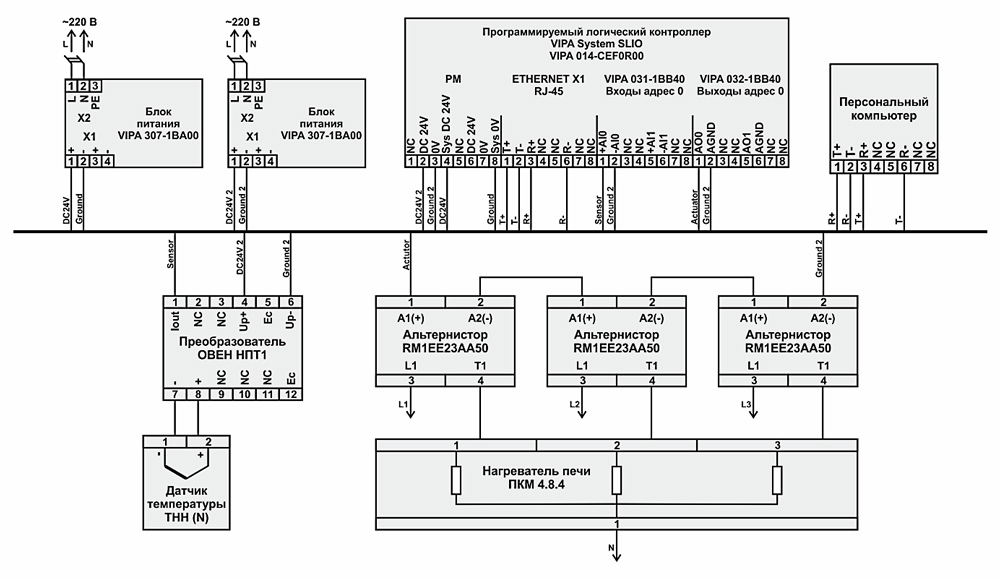
В качестве объекта была выбрана камерная печь ПКМ 4.8.4 мощностью 21 кВт с максимальной температурой в камере 1150 °C. После этого была разработана структура системы управления печью.

На базе структуры была разработана схема электрическая принципиальная.
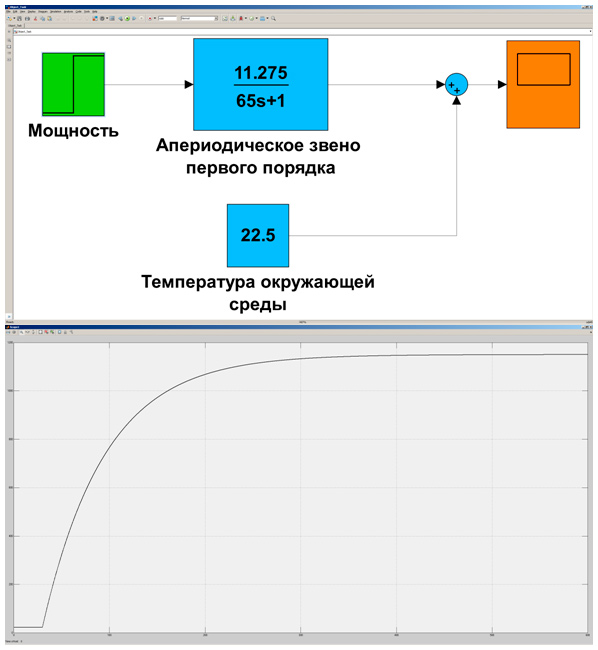
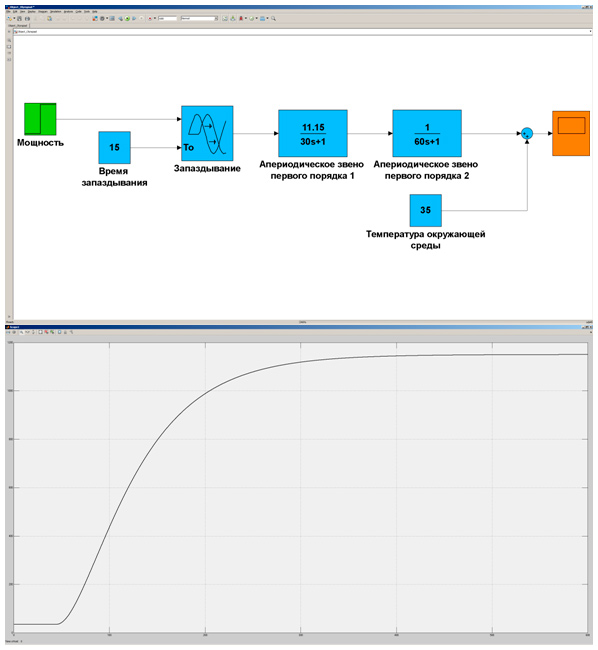
Далее необходимо было разработать математическую модель печи. Для примера задания в качестве математической модели было использовано апериодическое звено первого порядка, а для олимпиады апериодическое звено второго порядка с запаздыванием. При этом время переходного процесса было ограничено 20 минутами, а значение мощности от 0 до 21 кВт приведено к относительной величине с диапазоном от 0 до 100 %. Температура окружающей среды для примера была выбрана 22.5 °C, а для олимпиады 35 °C.
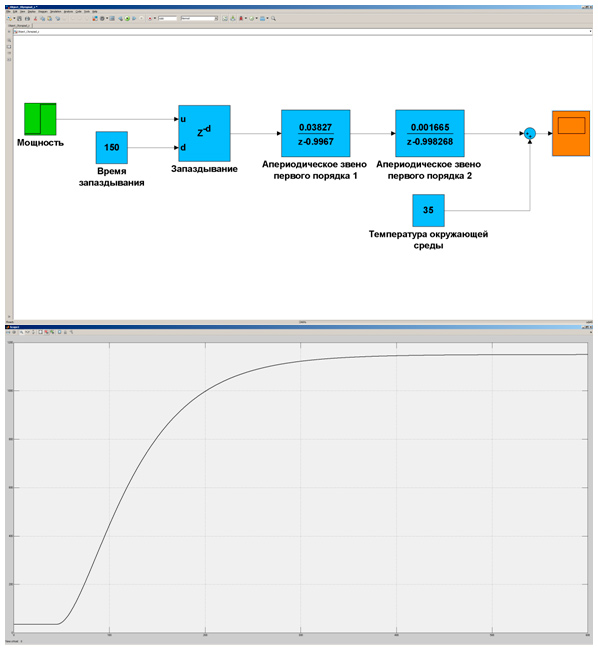
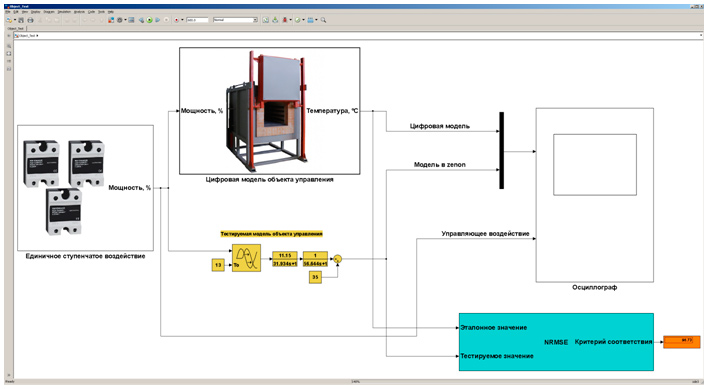
На основании передаточных функций в математическом пакете MATLAB были созданы модели объектов управления.
 |  |
Чтобы полученные модели можно было использовать в SCADA системе zenon, они были преобразованы из непрерывной формы в цифровую форму с шагом квантования по времени 100 мс.
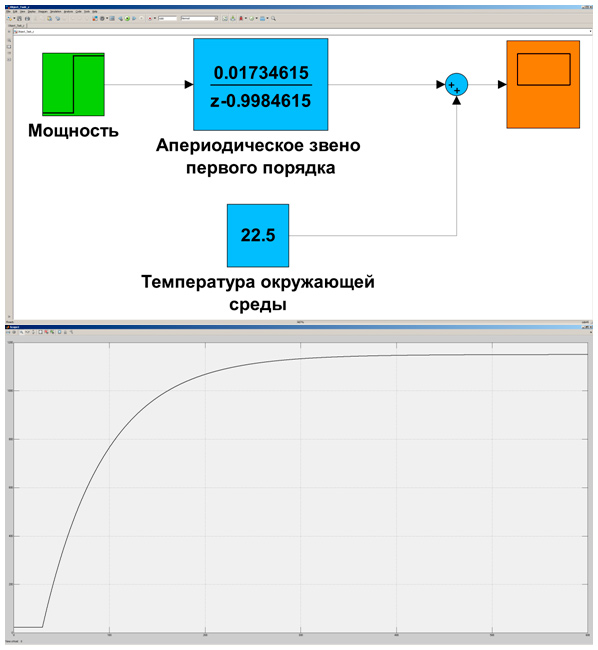 |  |
Математический пакет MATLAB позволяет преобразовывать цифровые модели из графической среды имитационного моделирования Simulink в язык программирования ПЛК Structured Text. Данный язык поддерживается программным ПЛК zenon Logic. Благодаря этому полученные модели могут быть напрямую использованы в SCADA системе zenon в качестве симуляции реального непрерывного объекта управления. При этом необходимо учитывать ограничение минимального шага квантования по времени программного ПЛК zenon Logic. Результаты такого преобразования для объекта первого и второго порядка с запаздыванием являются программа 1 и 2:
Программа реализующая объект первого порядка для примера задания
(* Outport: '
* Constant: '
* DiscreteTransferFcn: '
* Sum: '
bo_Temperature := (0.01734615 * _states) + 22.5;
(* Update for DiscreteTransferFcn: '
* Update for Inport: '
_states := bi_Power — (-0.9984615 * _states);
Программа реализующая объект второго порядка с запаздыванием для задания на олимпиаду
(* Outport: '
* Constant: '
* DiscreteTransferFcn: '
* Sum: '
bo_Temperature := (0.001665 * u_states) + 35.0;
(* DiscreteTransferFcn: '
u := 0.03827 * u_states_d;
(* Update for DiscreteTransferFcn: '
u_states := u — (-0.998268 * u_states);
(* Update for DiscreteTransferFcn: '
* Delay: '
u_states_d := _DSTATE[0] — (-0.9967 * u_states_d);
(* Update for Delay: '
* Update for Inport: '
FOR k := 0 TO 148 DO
_DSTATE[k] := _DSTATE[k + 1];
END_FOR;
_DSTATE[149] := bi_Power;
(* End of Update for Delay: '
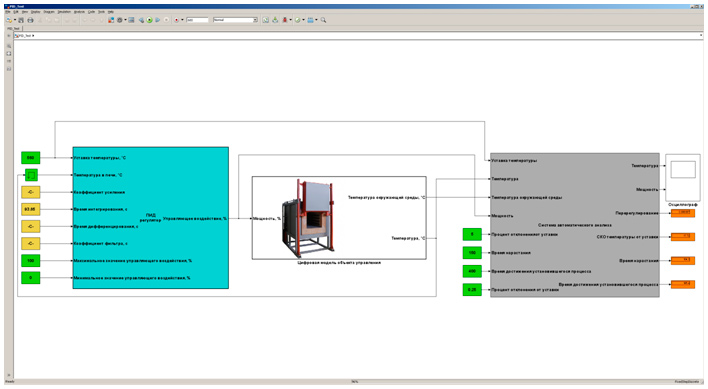
С помощью среды zenon Edition был разработан человеко-машинный интерфейс, отображающий в виде графиков значение мощности и температуры, а так же позволяющий задавать значение мощности в виде ступенчатого, импульсного или пользовательского воздействия. Для удобства проведения идентификации объекта управления была добавлена возможность регистрации значений мощности и температуры при помощи модуля “Historian” в текстовый файл формата “*.CSV”.
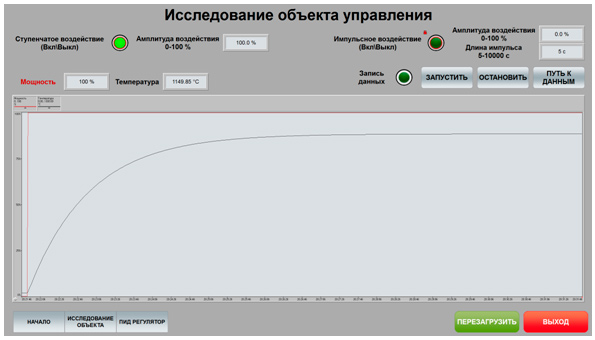 | 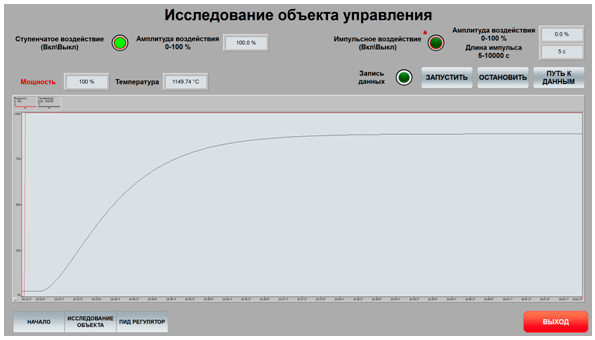 |
Таким образом, разработанное программное обеспечение для SCADA системы zenon реализует человеко-машинный интерфейс и модель непрерывного объекта управления, не отличающиеся от реального промышленного решения.
К концу января была закончена разработка системы управления камерной печи. За основу регулятора была взята структура программного ПИД регулятора компании Siemens, реализованного в виде блока CONT_C (FB41).

Как видно из структуры, ПИД регулятор имеет вынесенный коэффициент усиления, что соответствует ПИД регулятору идеальной формы. Выход регулятора ограничен значением мощности в диапазоне от 0 до 100 %. Данная структура ПИД регулятора в математическом пакете MATLAB может быть реализована при помощи блока “Discrete PID Controller”. Для упрощения структуры на рисунке не отображен фрагмент, отвечающий за предотвращение насыщения интегратора. Процесс разработки системы управления камерной печи и переноса ее в SCADA систему zenon аналогичен разработке модели объекта управления. Для оценки качества настройки ПИД регулятора были разработаны требования к точности и скорости переходного процесса. За наилучший результата был взят переходной процесс, полученный в результате использования оптимального по быстродействию регулятора. После чего полученные значения времени переходного процесса были увеличены в два раза для задания граничных значений, участвующих в рейтинге, что дало достаточно широкий диапазон для настройки ПИД регулятора.
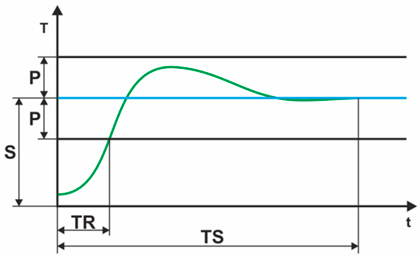
| № | Символ | Пример | Олимпиада | Название |
|---|---|---|---|---|
| 1 | S | 860 °С | 560 °С | уставка |
| 2 | P | 2.5 % | 5 % | процент отклонения от уставки |
| 3 | TR | 100 c
| 150 c | время нарастания |
| 4 | TS | 300 c
| 400 c
| время достижения установившегося процесса (отклонение от уставки не более 0.25 %) |
В середине февраля пример задания на практический тур был выложен в интернет в общий доступ, после чего с заданием могли ознакомиться все участники олимпиады. Для облегчения подготовки к олимпиаде участники могли скачивать виртуальную машину с уже установленной SCADA системой zenon и сразу приступать к ознакомлению с заданием.
Такой подход позволил организовать каждой команде, участнице олимпиады, рабочее место по исследованию объекта управления и системы управления, симулирующее все основные аспекты работы с реальным объектом на производстве.
Регистрация участников
Регистрация участников олимпиады проходила в аудитории учебного центра. Благодаря поддержке компании СВ АЛЬТЕРА каждый участник получил информационный пакет, бейдж и программу олимпиады.

Всего в олимпиаде приняли участие шесть высших учебных заведений:
После расселения в общежитии все желающие могли вернуться в учебный центр и проконсультироваться по заданиям. Наиболее часто задаваемые вопросы касались адресации памяти программируемых логических контроллеров VIPA, размещения картинок на изображениях и поворота элементов.
Теоретический тур
Официально олимпиаду открыл проректор по учебной работе Национального горного университета Хоменко Юрий Тимофеевич, пожелав участникам олимпиады больших свершений и побед.

После открытия участники разошлись по аудиториям и приступили к выполнению заданий, базирующихся на знаниях по теории автоматического управления и теории систем.
Практический тур
Сначала команды разыграли номера компьютеров, за которыми они должны были выполнять задание, после чего начался практический тур. По ходу прохождения олимпиады сотрудники учебного центра оказывали посильную помощь участникам, помогая в решении некоторых вопросов и разъясняя задание.
Оценка результатов участников практического тура происходила в два этапа. На первом этапе с помощью специального программного обеспечения было определено численное соответствие полученных результатов заданию. На втором этапе комиссией, состоящей из преподавателей принимающего ВУЗа, преподавателей команд и представителей СВ АЛЬТЕРА была выполнена комплексная оценка работ по сто-бальной системе.
Численная оценка производилась по следующим вопросам:
Результатом численной оценки стали рейтинговые показатели команд.
Перед тем, как приступить к оцениванию, судейской комиссии было продемонстрировано авторское решение. Авторское решение было представлено в виде видео презентации и отражало все аспекты разработки промышленной системы управления линейным непрерывным объектом.
Представители всех команд приняли активное участие в процессе судейства. Предложенная методика оценивания позволила сделать данный процесс прозрачным и удобным, благодаря чему результаты стали известны уже через час.

Призы для победителей, их руководителей и участников олимпиады были предоставлены компанией СВ АЛЬТЕРА. От имени Национального горного университета, кафедры Автоматизации и компьютерных систем и сотрудников учебного центра выражаем СВ АЛЬТЕРА теплые слова благодарности.
I МЕСТО Национальный горный университет
Ковальчук Олеся Олегівна

II МЕСТО Харьковский национальный университет радиоэлектроники
Міщук Вадим Валерійович

III МЕСТО Сумской государственный университет
Галаган Олександр Анатолійович

Бойко Олег Александрович, ассистент кафедры АКС НГУ
Воскобойник Евгений Константинович, ассистент кафедры АКС НГУ
Загорудько Валентин Валериевич, ассистент кафедры АКС НГУ
Носкин Дмитрий Вячеславович, ассистент кафедры АКС НГУ
Проценко Станислав Николаевич, доцент кафедры АКС НГУ