Головна » Рішення » Реалізовані проєкти » Автоматизація намотувального обладнання для виробництва склопластикових труб
06.07.2010
Метою автоматизації є створення системи управління, що забезпечує узгоджену роботу частотно-регульованих електроприводів обертання оправки і провідної зірочки ниткоукладача із заданою швидкістю відповідно до заданої циклограми. Налаштування циклограми здійснюється автоматично на підставі введених оператором технологічних даних.
1. Забезпечення узгодженої роботи приводів відповідно до циклограми (рис. 1), налаштування якої проводиться після введення оператором значень наступних параметрів:
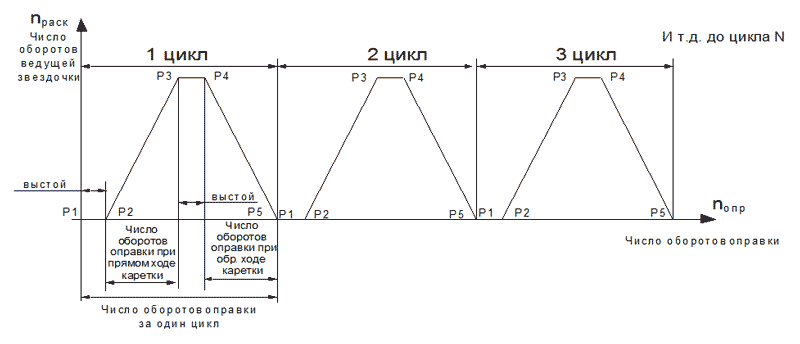
Мал. 1. Циклограма взаємопов'язаного обертання оправки та приводної зірочки ниткоукладача
2. Відпрацювання заданої кількості обертів оправки та провідної зірочки ниткоукладача з точністю ± 0,5 градуса.
3. Зміна з панелі оператора параметрів роботи установки в діапазонах та з кроком зміни відповідно до таблиці 1.
| Параметри, що вводяться | Граничні значення | Крок зміни |
| довжина труби L | (1000÷9000) мм | 1 мм |
| діаметр оправлення D | (50÷1200) мм | 1 мм |
| ширина стрічки b | (20÷200) мм | 1 мм |
| швидкість намотування V | (5÷50) м/хв | 1м/хв |
| число циклів N | 10÷3000 | 1 |
| кут армування α | (1÷85) град. | 1 град. |
| коефіцієнт вистою К | 0,9÷1,5 | 0,1 |
4. Забезпечення надійності роботи системи керування.
5. Реалізація наступних режимів роботи системи управління:
Устаткування з виробництва склопластикових труб є установкою (рис. 2), що складається з приводу обертання оправки і приводу лінійного переміщення ниткоукладача. Приводи керуються програмовним логічним контролером (ПЛК).
Обертання оправки відбувається безперервно із заданою швидкістю, при цьому система керування забезпечує циклічне укладання декількох склониток із заданим кутом армування рівномірно протягом усієї довжини оправки.
Контроль роботи оправлення здійснюється за допомогою інкрементного датчика (енкодера).
Процес пересування ниткоукладача відбувається вздовж обертової з постійною швидкістю оправки відповідно до циклограми (рис.1).
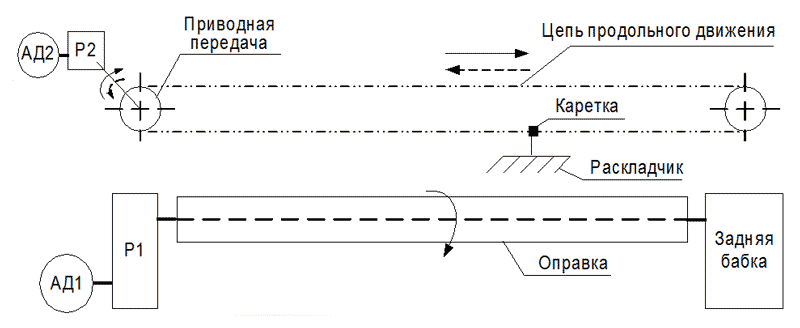
Рис. 2. Схема установки для виготовлення склопластикових труб
Обертання оправки відбувається постійно, рух каретки ниткоукладача визначається циклограмою і залежить від числа скоєних оправкою оборотів. Переміщення каретки ниткоукладача та обертання оправлення контролюються за допомогою енкодерів. На початку роботи відбувається вистій каретки – це етап укладання стрічки першому кінці оправки. Після цього слід переміщення каретки ниткоукладача, швидкість якої залежить від швидкості обертання оправки. При досягненні другого кінця оправки рух каретки припиняється на час вистою – цей час необхідний для укладання склониток другого краю оправки. Далі відбувається зворотне переміщення ниткоукладача до першого кінця оправки, а при його досягненні — зупинка.
Кількість циклів роботи (N) залежить від необхідної товщини стінок виробу.
Алгоритм керування, розроблений для забезпечення оптимальних умов намотування, наведено на рис. 3. Опис алгоритму наводиться нижче.
Етап 1: Введення та обробка параметрів
На цьому етапі контролер обробляє введені оператором параметри:
Також завантажуються коефіцієнти енкодерів, після чого система керування готова до початку циклу і очікується натискання кнопки ПУСК.
Етап 2: Підготовка циклу намотування
Метою даної процедури є точне позиціонування каретки ниткоукладача на початку оправлення.
Этап 3: Цикл намотки
Поточне значення лічильника шляху поправки порівнюються з точкою прив'язки Р2. Якщо оправлення не досягло точки Р2, то триває вистій ниткоукладача на початку проходу, інакше перевіряється, чи досягла оправлення точки Р3. Якщо ні, то відбувається рух ниткоукладача вперед. При досягненні оправки точки Р3 починається вистій в кінці проходу і проводиться порівняння положення оправки з точкою Р4. Коли оправлення досягне точки Р4, то перевіряється, чи оправка досягла точки Р5. Якщо оправлення не досягла точки Р5, то здійснюється рух ниткоукладача назад.
Коли лічильник шляху оправлення зрівняється з точкою Р5, закінчиться поточний цикл, після чого станеться обнулення лічильника шляху оправлення і лічильник числа циклів збільшиться на одиницю. Якщо виконано задану кількість циклів, процес намотування припиняється. При намотуванні також проводиться перевірка натискання кнопки СТОП, яка також зупиняє процес намотування.
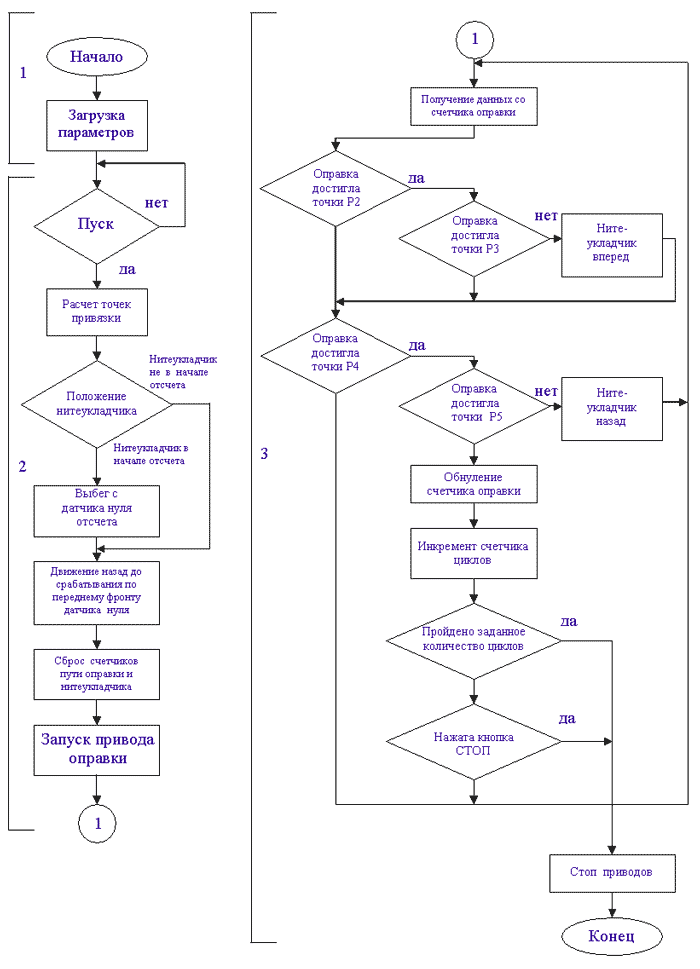
Рис. 3. Алгоритм керування процесом намотування
Структура системи керування представлена на рис. 4.
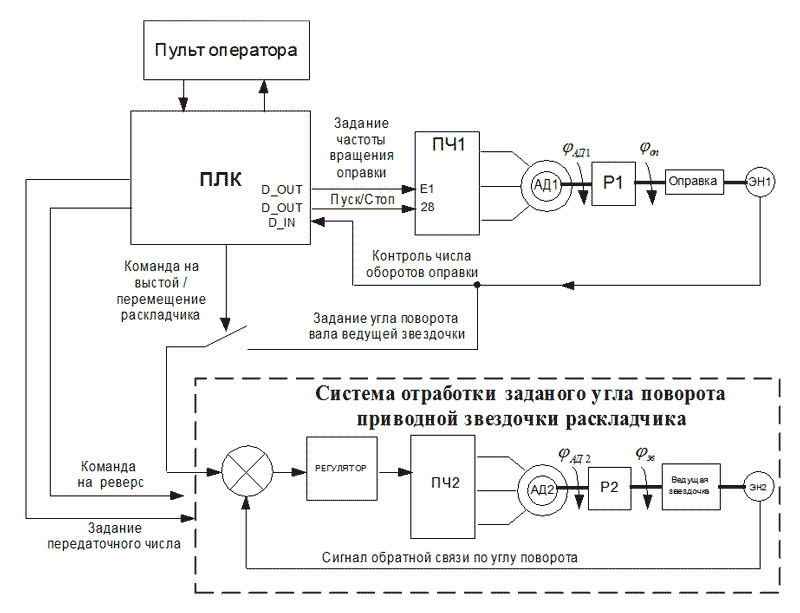
Мал. 4. Структура системи керування технологічним процесом
Система керування побудована на базі ПЛК VIPA 114 із вбудованими модулями дискретного введення та виведення.
Введення параметрів здійснюється з операторської панелі ОР 03 VIPA.
Відповідно до алгоритму були розроблені програми-додатки для управління роботою виконавчої частини технологічного пристрою.
Для приводів оправки та каретки ниткоукладача використовуються перетворювачі частоти (ПЧ) Lenze 8200 Vector. Обертання оправки та провідної зірочки ниткоукладача контролюється за допомогою інкрементних енкодерів фірми Autonics. Як кінцеві датчики та датчик початкового позиціонування ниткоукладача використовуються індуктивні датчики фірми CARLO GAVAZZI.
Система керування на базі контролера VIPA 114 забезпечує обробку наступних операцій у режимі реального часу:



